In de luchtvaart is het nog steeds zo dat alles wat naar boven gaat op een gegeven moment ook weer naar beneden komt. Iets wat een heel simpel gegeven is, door het bestaan van de zwaartekracht. Het idee is dat we dit op een zo gecontroleerd mogelijke wijze doen.
Hieronder wordt in depth besproken hoe de daling wordt berekend met krachten en formules.
Om het praktisch te houden, wat voorbeelden voor een standaard daling van 3 graden.
Afstand voor de daling: 3 x Hoogte + 10
VS benodigd: 5 x Groundspeed plus een beetje.
-----------
Je vliegt op FL100 met 250 KTS.
Wanneer begin je met dalen op een efficiente manier.
Je begint met 3 x je hoogte uit te rekenen. FL100 is 10.000 ft, je gebruikt alleen de 10. Dus 3 x 10 = 30 NM .
Hoe snel moet je dalen (Vertical speed)?
5 x je grondsnelheid (GS) plus een beetje is een handige. Laten we zeggen dat je grondsnelheid 250KTS is: 5 x 250 = 1250 plus een beetje, laten we 1300 ft per minuut nemen.
Dusssss, FL100, 250KTS ==> begin met dalen op 30NM en met een V/S van 1300 ft/min
======
Je vliegt op FL380, GS 480KTS
In dit geval moeten we de deceleratie erbij berekenen omdat je onder de 10.000ft/FL100, 250KTS of langzamer moet vliegen.
FL380 is 38.000 ft, we gebruiken alleen de 38. Dus 3 x 38 = 114 NM plus de deceleratie van je descent-IAS (wat hogere ligt dan 250KTS) naar 250KTS, laten we daar 10NM voor nemen om het makkelijk te houden. 3 x 38 + 10 = 124NM voordat we landen willen we beginnen met de daling.
Hoe snel (V/S) gaan we dalen? Remember de 5 x GS plus een beetje.
5 x GS = 5 x 480 = 2400 + een beetje. laten we er 2500 ft/min van maken.
Opgelost: 124NM voor landing beginnen met dalen met een VS van 2500 ft/min.
!! Tijdens de daling uiteraard je profiel in de gaten houden. Zak je door de FL250 heen dan zou je op zo een 85 NM moeten zitten (3x25+10), zit je op 100NM dan weet je dat je te snel daalt en pas je dit aan. Zit je op 70 NM dan weet je dat je door moet zakken.
---------
TIP: als 5 x de Groundspeed lastig is om uit te rekenen, halveer dan de GS, in dit geval 480/2= 240 ==> 2400 ft/min
of 5 x 250kts= 250/2 = 125 ==> 1250 ft/min
Vandaag de dag staat de luchtvaart nogal onder druk van onder ander: geluidshinder, CO2-uitstoot en niet te vergeten brandstofprijzen. Hierdoor wordt er van ons verlangd dat we steeds stiller, schoner en zuiniger gaan vliegen. De perfecte vlucht om aan al deze eisen zo goed mogelijk te voldoen zou een verticaal profiel hebben van een berg-parabool. Om verschillende redenen is dit echter niet haalbaar
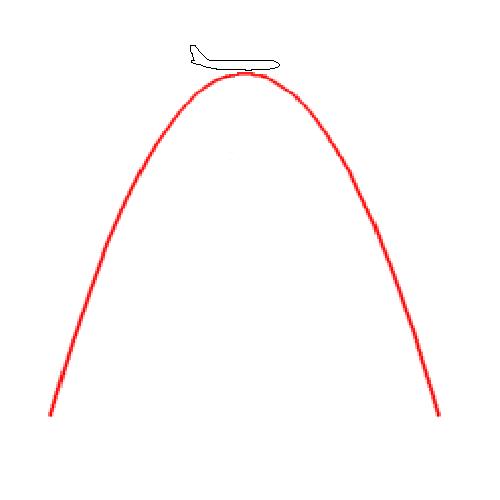
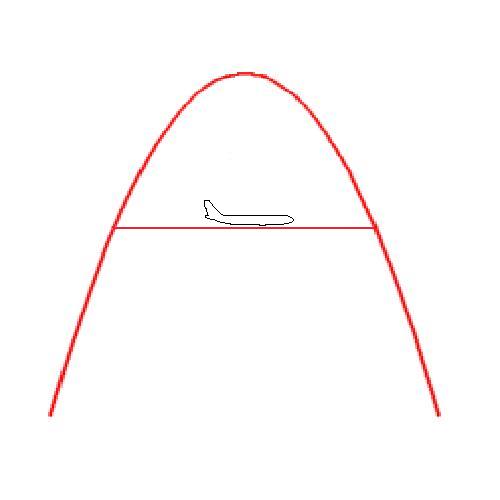
Een niet onbelangrijke reden is dat over grotere afstanden de top van de parabool (ver) boven de maximum vlieghoogte van een type vliegtuig zal liggen. Verder willen luchtvaartmaatschappijen graag een level cruise-segment in de vlucht hebben.
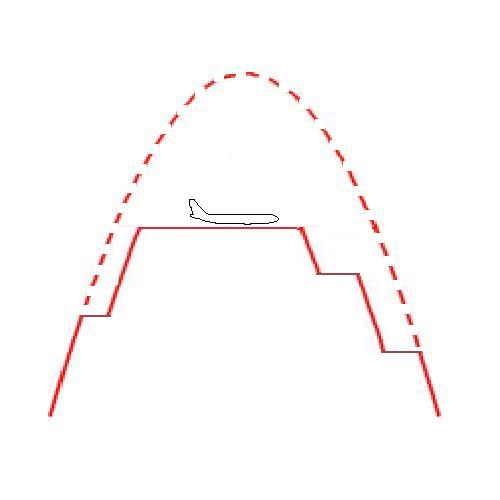
Daarnaast zal het overgebleven profiel nog verder verstoord worden door de structuur van het luchtruim en ATC restricties, waardoor een continuous climb of descent niet mogelijk zou kunnen zijn. Het figuur dat overblijft heeft iets weg van een trapezium. En dat is het profiel waar we naar streven om zo dicht mogelijk bij te blijven.
In de kruisvlucht zijn alle krachten die op een vliegtuig werken mooi in balans en is de resulterende kracht nul. Volgens de eerste wet van Newton is een voorwerp waarop geen resulterende kracht werkt, in rust, of beweegt rechtlijnig met een constante snelheid voort.
Een vliegtuig zit vol energie. Die energie zit in de massa, hoogte en snelheid van het vliegtuig. Zoals blijkt uit de hiernaast gepresenteerde formules. Om weer van deze energie af te komen, moeten de hoogte en snelheid teruggebracht worden tot nul. Aangezien (g) een vaste waarde is en niet wijzigt. De massa (m) zal wel afnemen gedurende een vlucht, namelijk het gewicht van de gebruikte brandstof die je niet meer bij je draagt. De massa zal echter nooit 0 worden. De totale energie zal geleidelijk afnemen in de descent. Mocht er ineens een verandering in het descent-pad nodig zijn, kan dat door energie te "verschuiven". Omdat de snelheid (v) en de hoogte (h) de enige echte variabelen zijn. Je kan hoogte "inruilen" voor snelheid door deze te laten toenemen. En andersom kun je snelheid "inruilen" voor hoogte door de snelheid af te laten nemen en minder snel te gaan dalen.
|
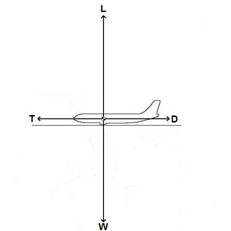 |
Om de daling in te zetten wordt de Thrust (T) gereduceerd. In de tekening hiernaast is er geen Thrust-vector meer. In werkelijkheid zal bij een normale vlucht er een residual Thrust-vector overblijven. Deze tekening geldt in theorie dus alleen voor een glijvlucht. Het doel van onderstaande formules is om aan te tonen dat er een verband bestaat tussen de verhouding tussen Drag en Lift en de verhouding Hoogte en Afstand.
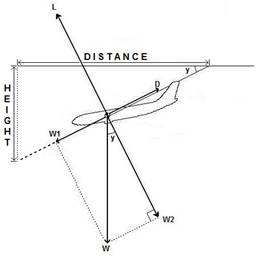
sin(y)=W1/W cos(y)=W2/W1 W1 = D W2 = L W*sin(y)=D W*cos(y)=L
De glijhoek (y) is afhankelijk van de Lift-Drag-verhouding
D/L = W*sin(y)/W*cos(y) = sin(y)/cos(y) = tan(y) = HEIGHT/DISTANCE
Voorbeeld: Het onderstaand voorbeeld zal realistische getallen bevatten om te laten zien dat het ongeveer klopt.
HEIGHT/DISTANCE = 300ft/1NM = 300ft/6000 ft = 0,05 = 2,86° tan(y) * DISTANCE = HEIGTH => tan 3° * 6000ft / 314ft
Uit bovenstaande gegevens blijkt dat de enige manier om correcties te maken op het glijpad is om de verhouding tussen Drag en Lift aan te passen. Dat kan op verschillende manieren zoals te lezen is hieronder, in het kopje Energy Management.
Het werk wordt de piloot vandaag de dag vrij makkelijk gemaakt. Zolang de FMC (Flight Management Computer) voorzien wordt van de juiste data, vertelt deze je precies wanneer je bij je TOD (Top Of Descent) bent. Het is goed idee om de FMC te cross-checken.
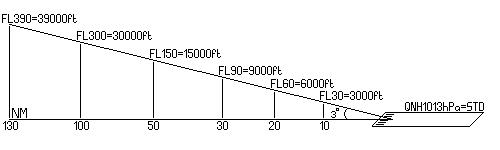
In principe dalen we altijd op of rond een 3 graden glijpad. Een vrij eenvoudig sommetje is een goede richtlijn om te zien of je op je profiel zit.
Het werkt voor de hele descent, van TOD tot touchdown. Het glijpad van een ILS is ook (meestal) gebasseerd op 3 graden. Het komt dus neer op 300ft per NM.
Welke V/S (Vertical Speed) hoort daar nu bij? Daar is geen vast getal voor te geven. Er is wel een vuistregel die daar bij helpen kan.
| Vertical Speed voor een 3-graden-glijpad bij verschillende GS | |||||||||
| GS (kts) | 450 | 400 | 350 | 300 | 250 | 220 | 180 | 160 | 140 |
| V/S (ft/min) | 2250 | 2000 | 1750 | 1500 | 1250 | 1100 | 900 | 800 | 700 |
LET OP!! Zoals reeds gesteld is er is geen vast getal voor. Het hangt af van je Ground Speed. Je GS is afhankelijk van de wind en TAS (GS= TAS +/- Wind). Beiden zullen veranderen tijdens je daling. De wind is altijd maar een vraag. De TAS zal tijdens de daling altijd afnemen.
| GS | Benodigde Vertical Speed (ft/min) | |||||||||||||
| Trackmiles (NM) | 10 | 20 | 30 | |||||||||||
| Hoogte (ft) | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | 3000 | 6000 | 9000 | 12000 | 3000 | 6000 | 9000 | 12000 |
| 180 (3 NM/min) | 300 | 600 | 900 | 1200 | 1500 | 1800 | 450 | 900 | 1350 | 1800 | 300 | 600 | 900 | 1200 |
| 210 (3,5 NM/min) | 350 | 700 | 1050 | 1400 | 1750 | 2100 | 525 | 1050 | 1575 | 2100 | 350 | 700 | 1050 | 1400 |
| 240 (4 NM/min) | 400 | 800 | 1200 | 1600 | 2000 | 2400 | 600 | 1200 | 1800 | 2400 | 400 | 800 | 1200 | 1600 |
| 270 (4,5 NM/min) | 450 | 900 | 1350 | 1800 | 2250 | 2700 | 675 | 1350 | 2025 | 2700 | 450 | 900 | 1350 | 1800 |
| LET OP, als je met deze snelheden zoveel hoogte kwijt moet, zo'n V/S haal je niet zonder extra weerstand te creéeren (Slats/Flaps, Gear, Speedbrakes). Bovendien zit je ver boven je 3 graden glijpad. | ||||||||||||||
Het is eigenlijk wat het zelf al zegt. Een nadering waarin continue gedaald wordt en dus geen level-off's in zitten. Om een mistverstand meteen uit de weg te nemen: Een CDA wordt niet gevlogen van TOD. Dit zou een onmogelijke opgave worden voor zowel ATC als piloot om daarop te kunnen anticiperen. Een goede richtlijn is dat een CDA van je verwacht kan worden vanaf ongeveer je IAF (Initial Approach Fix). Het is ook in Real-Life nog een vrij nieuw fenomeen. Het nut er van is om zo min mogelijk geluidsoverlast te creëeren. In plaats van zo snel mogelijk te dalen om vervolgens weer vermogen bij te zetten, om een stuk level te vliegen is wat we proberen te voorkomen. De kunst is om je daling en descelleratie zo in te plannen dat je zonder level-off's op de G/S van de ILS terecht komt.
Een CDA vraagt zowel van de controller als de piloot een stukje planning, position- en situational awareness. Hoewel de RIVER2A-TRANSITION de meeste bewoonde gebieden ontwijkt, zal aan de hand hiervan een voorbeeld gegeven worden, hoe een CDA te vliegen. Het is geen exacte wetenschap zoals in het voorbeeld. Het enige benodigde zijn de vuistregels en je Trackmiles die je nog te gaan hebt. Je weet dan meteen of je te hoog/laag of goed zit. Mocht ATC bijvoorbeeld je van RIVER DCT CH geven. Heb je maar 24 NM om de zelfde hoogte en snelheid te verliezen. 24NM x 3 = 7200ft. Terwijl je maar 5000ft hoeft te dalen. Let wel op dat je niet vergeet op tijd te vertagen.
Condities: ISA (standaard atmosfeer); Windstil (TAS=GS); FL070, 250 KIAS @ RIVER; 4000ft, 220 KIAS @ SOKSI; 180 KIAS ILS06 (LOC en G/S) intercept @ 6.2 KAG.
24NM (trackmiles) tussen RIVER en SOKSI. 250 KIAS komt gemiddeld (TAS neemt af in de daling) overeen met 270 KTAS, 270 KTAS is 4,5 NM/min. Dus 5 m20s van RIVER naar SOKSI. 3000ft dalen, dus 600 ft/min dalen. Het is dus duidelijk geen 3 graden glijpad. Met een TAS van 270 zou een V/S horen van 1350ft/min. Je zou dan al halverwege level op 4000ft vliegen. Bij SOKSI moeten we 220 KIAS vliegen. Er moet dus nog vertraagd worden. Om te descellereren in een descent neem je 2NM per 10 KIAS. Dus voor 30 KIAS, 6NM. Even voor EH610 beginne met vertragen dus.
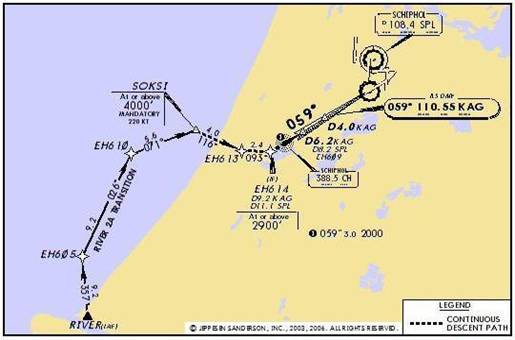
9,4NM tussen SOKSI en 6.2 KAG, 220 KIAS geeft 230 KTAS is 3,9 NM/min. Dus 2m25s. 900 ft/min dus. Nu moet er opnieuw vertraagd worden, om te kunnen configureren. De meeste vliegtuigen lukt dat wel met minder dan 1000ft/min. Om bij 180 KIAS uit te komen heb je 8NM in de descent nodig, dat past dus. Vanaf hier zit je op de ILS en kun je verder configureren en vertragen zoals gewoon, en toch heb je een CDA gevlogen.
Dit is in feite waar de hele descent-planning om draait. Het vliegtuig zit vol met potentiële (Epot) en kinetische (Ekin) energie. Epot zit in je hoogte, Ekin in je snelheid. Je kunt natuurlijk elke keer als je een descent klaring krijgt aanduiken, aflevellen en er dan achter komen dat je nog een heel eindje te gaan hebt. Het is een manier die werkt, maar verdient geen schoonheidsprijs. Je bent namelijk:
1) Langzamer, door eerder te dalen neemt je TAS en dus je GS af (er van uit gaande dat het windstil is). Uit een sterke headwind duiken omdat je weet dat lager een significant zwakkere headwind is wel weer slim.
2) Niet economisch. Je bent zoals in 1) omschreven dus langer onder weg waardoor er meer brandstof verbruikt zal worden. Daarnaast is het brandstof verbruik op lagere hoogtes altijd hoger.
3) Niet millieuvriendelijk bezig, om de zelfde reden als in 2)
4) Geluidshinder. Aflevellen op lagere hoogtes, vraagt om een zodanige toename in vermogen dat het niet wordt gewaardeerd door omwonenden.
Er wordt dus geprobeerd om als piloot zo goed mogelijk een descentplanning te maken. Deze wordt al dan niet verstoord door instructies van ATC. Door zelf continue te weten hoe veel mijl je nog te gaan hebt, hoe hoog je zit en welke snelheid je hebt, en op een bepaald punt wilt hebben. Kun je dus bepalen of je goed zit, of hot and high bent.
Low and Slow: Je zit onder het profiel en is in zoverre geen probleem dat het makkelijk gecorrigeerd kan worden door minder snel te gaan dalen, en later te gaan vertragen. (NOTE: Het gaat over het profiel. Low en Slow op de Approach is geen goede situatie om in te zitten)
hot and High: Hier zijn verschillende oplossingen voor, afhankelijk van wat de situatie is en wat er tot je beschikking staat.
Hot: ATC draagt je op langzamer te gaan vliegen. Dan kun je als het verticale profiel het toelaat je V/S verminderen of zelfs tussentijds aflevellen in dien nodig.
High: Je zit boven je profiel, of ATC vraagt je V/S te vergroten. Dan kun je als er geen speed-resticties zijn je snelheid verhogen. Let wel op in welke vertical en thrust mode je vliegt. Als je in V/S-mode vliegt en je verhoogt je snelheid gebeurt er niets met je V/S. Als je heel snel naar beneden wil kun je het best in LVL CHG (Boeing) of OP DES (Airbus) met je thrust op (flight)idle vliegen. Verhoog je dan de snelheid, dan zal het vliegtuig de neus laten zakken en aanduiken. Door dat je sneller gaat vliegen neemt je Drag toe, zoals blijkt uit de drag-curve hiernaast.
Ben je Hot and High: Je zit ver boven je profiel, en ATC draagt je op te vertragen. ATC weet over het algemeen dat die twee niet samen gaan. Je kan nog vragen of je de speed mag gebruiken zoals hierboven beschreven en daarna kunt vertragen (use the speed, lose the height, lose the speed). In het geval dat het niet kan/mag, wordt er om drastischere, minder "schone" maatregelen gevraagd. Je zult het vliegtuig "dirty" moeten maken. Daarmee wordt bedoeld dat je meer weerstand gaat creëeren. Op grotere hoogtes en snelheden, vraagt dat om de speedbrakes. Het vleugelprofiel wordt verstoord. NOTE: speedbrakes hebben meer effect bij grotere snelheden. Zit je echter al in de buurt van de approach (binnen 25 trackmiles) heeft het meer zin om te gaan configureren. Je vliegt toch al langzaam en zal nog langzamer moeten gaan vliegen. Kies bij voorkeur eerst voor slats/flaps met een snelheid die 5-10 kts onder je next flap speed ligt. Zo kun je namelijk wel de volgende stand slats/flaps selecteren en toch de snelheid gebruiken om nog iets aan te duiken. Worden er om drastische maatregelen gevraagd, selecteer dan het landing gear. Dit geeft namelijk alleen extra weerstand, in tegenstelling tot de slats/flaps, die ook weer meer lift geven.
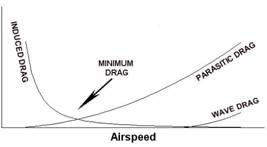
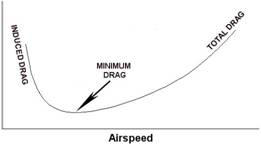
Induced Drag: Weerstand als gevolg van de Lift
Parasitic Drag: Weerstand als gevolg van de vorm van het object en wrijving met de lucht
Wave Drag: Weerstand als gevolg van een schokgolf.
